
Beyond Sensors: How Einstein’s Relativity is Guiding Microrobots
The challenge of navigating in confined spaces is universal, from a Roomba bumping around furniture to a surgeon maneuvering instruments within the human body. But what if we could guide microscopic robots – smaller than the width of a human hair – without relying on the bulky sensors and complex programming that currently limit their potential? A team led by Marc Miskin, an assistant professor of electrical and systems engineering at the University of Pennsylvania, has taken a strikingly unconventional approach: applying the principles of Albert Einstein’s theory of general relativity to create “artificial space-time” for these tiny machines. This isn’t about building miniature warp drives, but rather about leveraging the fundamental way objects move through curved space to achieve precise, sensorless navigation.
Drawn from Live Science.
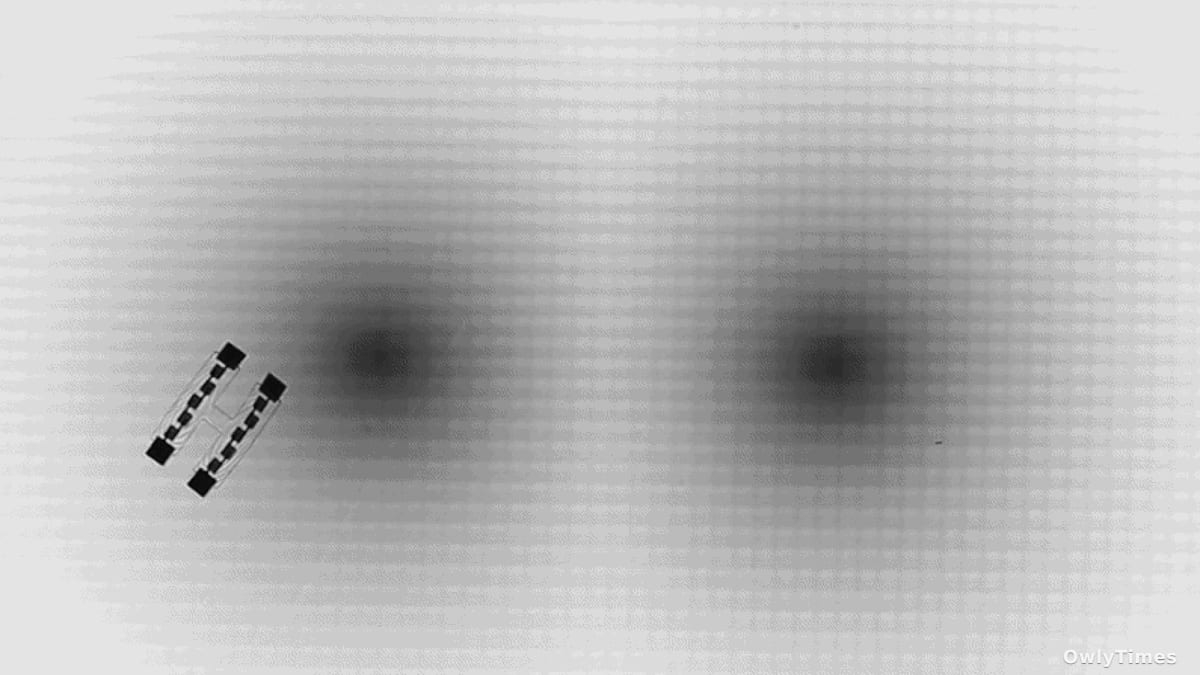
The core innovation, published in November 2025 in npj Robotics, lies in reframing the navigation problem. Traditional microrobot control relies on constant feedback – “is the robot hitting a wall? Is it drifting off course?” – requiring onboard sensors and processing power that quickly become impractical at microscopic scales. Miskin’s team instead asked: what if the environment itself could guide the robot, much like gravity guides planets? They modeled a maze, the initial testing ground for this technology, not as a series of walls and corridors, but as a warped virtual space-time. Within this model, the shortest path to the target – a geodesic, in relativistic terms – became a straight line. The crucial step was then translating this abstract mathematical solution back into a physical reality: a 2D light map.
This light map isn’t random. Darker areas act as gravitational “wells,” attracting the robots, while brighter areas repel them. The target destination is the darkest spot, effectively a faux black hole, and obstacles are illuminated to steer the robots around them. The robots themselves, known as EK robots, are propelled by light; they move towards or away from light sources. What’s remarkable is that regardless of their starting position within the maze, these robots naturally follow the geodesics dictated by the light pattern, navigating the complex environment without any onboard sensing or complex calculations. As Miskin explained to Live Science, “We showed that the way EK robots behave in patterned light fields is identical to the paths light follows in general relativity.” This isn’t simply inspired by relativity; the correspondence is, according to the research, exact.
It’s important to clarify what this study doesn’t claim. Headlines proclaiming “robots guided by gravity” are misleading. The robots aren’t experiencing gravitational forces in the traditional sense. Instead, the light patterns are engineered to mimic the effects of gravity on the paths of objects in space-time. The team isn’t creating gravity, but rather exploiting the mathematical equivalence between light propagation in curved space-time and the behavior of these light-activated robots. This distinction is critical; it’s a clever application of established physics, not a breakthrough in gravitational manipulation. Furthermore, the current demonstration is limited to a 2D maze. Scaling this approach to three-dimensional environments, and more complex geometries, presents a significant hurdle.
Limitations to Consider: From Mazes to Medicine
The current research is a proof-of-concept, and several limitations must be acknowledged. The mazes used in the study are relatively simple, and the robots’ movement is still somewhat slow. The light patterns also require precise calibration and control, which could be challenging to maintain in dynamic or cluttered environments. While the team successfully demonstrated autonomous navigation, the system currently requires a pre-defined map of the environment to generate the appropriate light pattern. A future challenge will be developing systems that can adapt to unknown or changing environments in real-time. The robots themselves are also currently limited in their functionality; they can move, but lack the ability to manipulate objects or perform complex tasks.
Despite these limitations, the potential applications are compelling. Miskin envisions a future where these robots could perform minimally invasive procedures, such as biopsies or targeted drug delivery, within the human body. Imagine tiny robots navigating the intricate network of blood vessels to deliver chemotherapy directly to a tumor, or inspecting the aftermath of a root canal to ensure complete removal of infected tissue. Beyond medicine, the technology could also be used in micro-assembly, constructing complex microchips or other miniature devices with unprecedented precision. The team estimates practical applications could emerge within the next 10 years, but significant engineering challenges remain.
A Bridge Between Physics and Robotics
This research isn’t just about building better robots; it’s about forging a deeper connection between fundamental physics and practical technology. Miskin emphasizes that this work is “rather than a competition between them,” highlighting the potential for established theories of optics and relativity to inform new approaches to robotics. The experiments also offer a novel way to explore the intricacies of general relativity itself, particularly in the context of “flat space-times” in 2D spaces. By using the robots as a physical analog for gravitational phenomena, researchers can gain new insights into the behavior of space-time under extreme conditions.
The next crucial step will be to translate this 2D success into a 3D environment. This will require developing more sophisticated light control systems and addressing the challenges of robot orientation and stability in three dimensions. Researchers will also need to explore different robot designs and propulsion mechanisms to optimize performance and functionality. But perhaps the most important question is: how can we move beyond pre-defined maps and create robots that can autonomously explore and navigate unknown environments, guided solely by the principles of relativity? If that can be achieved, we may be on the cusp of a revolution in microrobotics, unlocking a world of possibilities previously confined to the realm of science fiction.